Mini Pupper will make robotics easier for schools, homeschool families, enthusiasts, and beyond.


 Picture a dog-shaped quadruped robot that can hop, trot, and run around, supporting 12-DOF, ROS (Robot Operating System) SLAM, Navigation, and OpenCV AI functions—while being inexpensive. Mini Pupper is the dream sidekick for you to learn and experiment with robotics, exploring advanced functions of a dynamic robot that would typically not be available at this price point.
Picture a dog-shaped quadruped robot that can hop, trot, and run around, supporting 12-DOF, ROS (Robot Operating System) SLAM, Navigation, and OpenCV AI functions—while being inexpensive. Mini Pupper is the dream sidekick for you to learn and experiment with robotics, exploring advanced functions of a dynamic robot that would typically not be available at this price point.


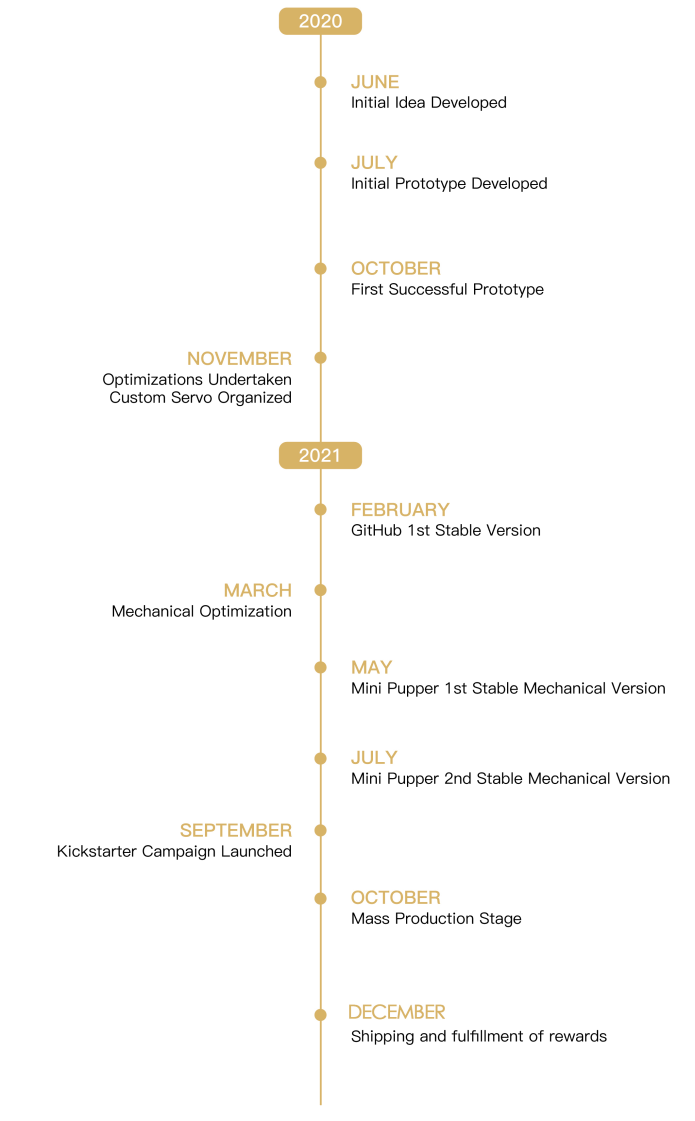
In June 2021, MangDang released Mini Pupper on the Stanford Pupper website in collaboration with Nathan Kau, the original creator of Stanford Pupper, to bring to market a commercial and reasonably priced educational quadruped robot that anyone could engagingly use for fun robotics research and experiments.
Mini Pupper’s design was based on the feedback we received from our existing customers. The ease of use, assembly and disassembly are the result of precious feedback from users that allowed us to keep improving what ultimately came to be a user-centric robot that you can easily understand, explore, learn from, and play with—and for a price that most can afford!

Mini Pupper is a dog-shaped robot that is aimed at stimulating and empowering your creativity. That’s why we are not presenting it as a closed project that can’t evolve from here. On the contrary, Mini Pupper leverages Ubuntu and ROS to operate its FSN (Full Self-Navigation) System.
Mini Pupper supports not only Melodic but also Noetic. ROS2 is also in our pipeline.

SLAM
MiniPupper supports SLAM (Simultaneous Localization and Mapping), it can map its environment and learn in real-time from things around using Lidar or a camera sensor.
Navigation
With the map, Mini Pupper can answer “where am I? Where am I going?” you can call it self-driving technology.

Mini Pupper is an open-source dog robot you can explore whatever you want!
Mini Pupper’s software is compatible with Robot Operating System (ROS) using a forked version of Champ Quadrupedal Framework led by Juan Miguel Jimeno. The software stack runs on a customized hardware based on Stanford’s Pupper project. Many thanks to the open source community for making Mini Pupper a reality.
Mini Pupper is an open-source dog robot you can explore whatever you want!
Mini Pupper’s software is compatible with Robot Operating System (ROS) using a forked version of Champ Quadrupedal Framework led by Juan Miguel Jimeno. The software stack runs on a customized hardware based on Stanford’s Pupper project. Many thanks to the open source community for making Mini Pupper a reality.
- Software
Gait Performance
You can use Mini Pupper to explore many gait performances, such as Trot (diagonal pairs), Pace (lateral pairs), and the Bound (front and rear pairs).
 ‘
‘
Facial Animation
You can easily custom your own facial animation, mechanical shell, and your own algorithms, we will supply enough guide documents and videos to make it easy. Here are three preset animations, you can change and make your own set by just one click!
Hardware
You can DIY and customize a UNIQUE MiniPupper in the world. Check out those MiniPuppers created by our fans!

 Mini Pupper supports OpenCV’s latest 3D camera module, named OAK-D LITE, it brings the superpowers of Spatial AI to the price-point necessary to unlock all sorts of applications. With the module, Mini Pupper can run face detect, recognition, object detect, recognition, etc.
Mini Pupper supports OpenCV’s latest 3D camera module, named OAK-D LITE, it brings the superpowers of Spatial AI to the price-point necessary to unlock all sorts of applications. With the module, Mini Pupper can run face detect, recognition, object detect, recognition, etc.
With OAK-D-Lite vision, it’s now your Border-Collie-level smart robotic dog. Border Collies are amazing because they can learn very specific hand signals (and they’re neurotic about them). Now Mini Pupper can be just as amazing (and neurotic)!

Custom servo
Servo is the key component to a robot dog. We’ve got high torque custom servos which allows it to go fast and stable. We didn’t just choose the cheapest option, we chose the right option. We wanted it to have personality and be approachable. and draw people in.
12DOF
Most robots of this category feature an 8 DOF (degree of freedom), which translates into less organic movements. We were not happy with the idea of limiting Mini Pupper to these constraints, so, after extensive debate within our team and research, we were eventually able to create our quadruped robot with a 12 DOF that allows it to follow biological movements but at an affordable price point that isn’t made inaccessible to the average consumer.
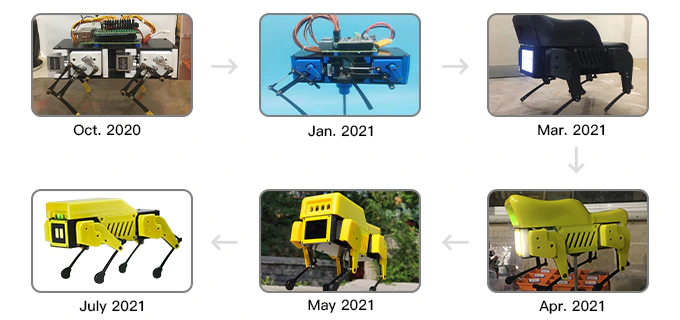
Iteration
You can find our Mini Pupper Prototype, on Dec 2020, we used more than 8+ months to make Mini Pupper stable and more perfect for you to use.

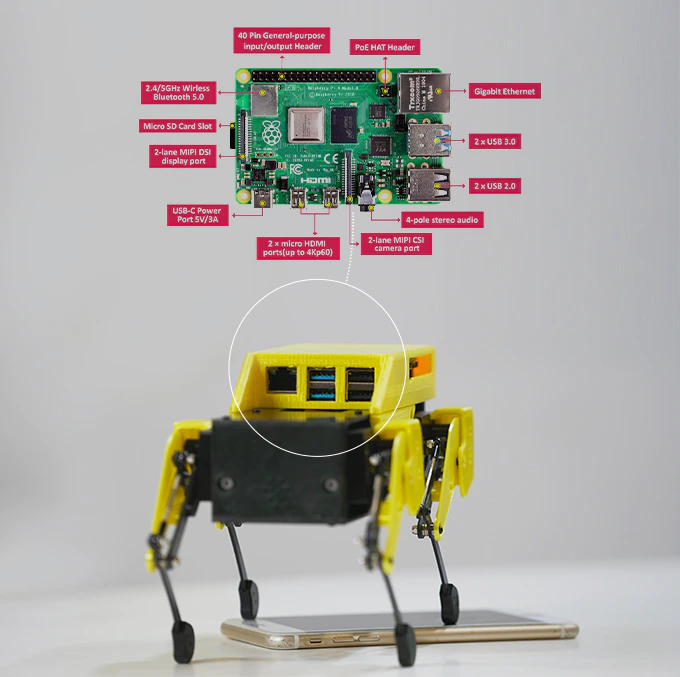
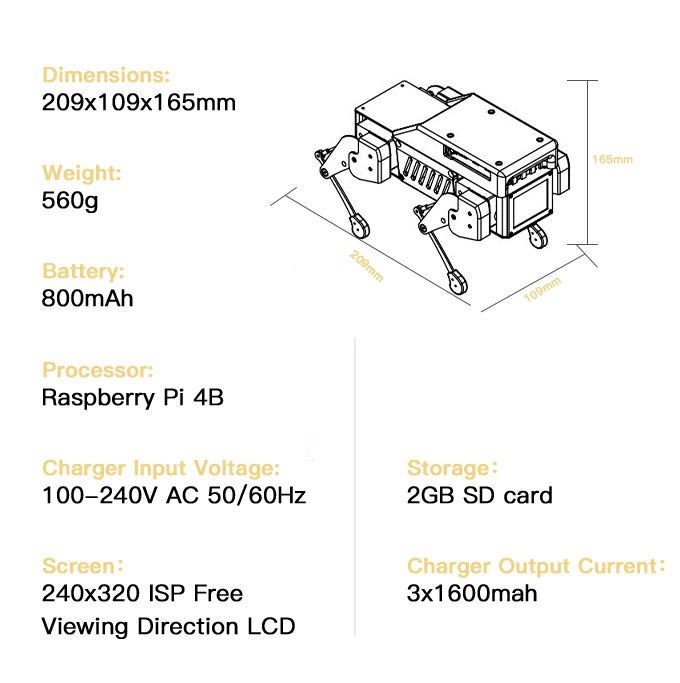
Raspberry Pi
Based on Raspberry Pi, MiniPupper is super expandable. You can explore more with MiniPupper!
How to use it?
You can use the controller to enjoy and explore Mini Pupper’s many features. Besides that, you can easily custom your own facial animation and algorithms by PC, we will supply enough guide documents and videos to make it easy. 
While Mini Pupper provides an exciting journey into the world of robotics for anyone, there’s a central educational mission that this unique robot needs to accomplish. Mini Pupper wants to help you learn about robotics and experiment with this brave new world in a fun way.
That’s why we’re also organizing an online course series that is tied to understanding and exploring Mini Pupper—namely the mechanical, hardware, ROS, SLAM, navigation, AI, and other angles of the robot. In other words, for you, this is the robotic educational experience of a lifetime!


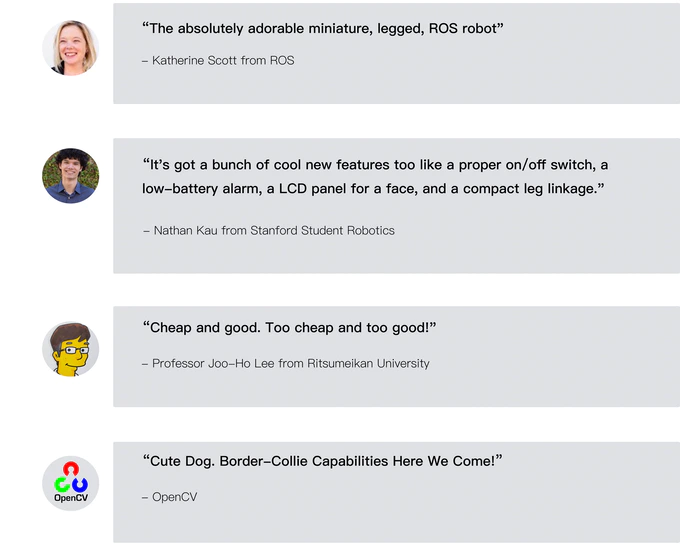
 Open source: Mini Pupper is inspired by Stanford Pupper open source project. You can find and download the design files and source code from the Mini Pupper Github project link. Mini Pupper was featured by Hackaday, Hackster, Make, won a Hackaday Prize. We got so much help from the Hackaday community, such as project reviews from Majenta and Mitch, Hack Chat support from Dan Maloney. Really really thanks for all the open source communities.
Open source: Mini Pupper is inspired by Stanford Pupper open source project. You can find and download the design files and source code from the Mini Pupper Github project link. Mini Pupper was featured by Hackaday, Hackster, Make, won a Hackaday Prize. We got so much help from the Hackaday community, such as project reviews from Majenta and Mitch, Hack Chat support from Dan Maloney. Really really thanks for all the open source communities.
HackChat
It’s our pleasure to share all that we know, if you have any questions, please join the Robot Dogs #HackChat, Wednesday, Sept. 29th at Noon Pacific. Click here to join!
 With the OpenCV 3D camera module, named OAK-D LITE, Mini Pupper can track hands and/or full body pose in full 3D coordinates. It’s endless possibilities. Many thanks to Brandon Gilles’s great help from the OpenCV and Luxonis communities.
With the OpenCV 3D camera module, named OAK-D LITE, Mini Pupper can track hands and/or full body pose in full 3D coordinates. It’s endless possibilities. Many thanks to Brandon Gilles’s great help from the OpenCV and Luxonis communities.

Mini Pupper can run on Ubuntu and ROS, now the ROS version is Melodic, updating to Noetic, ROS2 is also on our pipeline. It can support SLAM, Navigation and other ROS features. On 6th Oct. will host an interview with Kat Scott from the ROS & Open Robotics community. We got much help and support from Kat, really appreciate Kat’s great help.


Founded in 2020, MangDang Technology Co., Limited (MangDang) specializes in the research, development, and production of robot products that make people’s lives better.
MangDang is headquartered in Hong Kong. We are a global team with members from many countries such as the United States, Japan, Canada, Poland, and China.

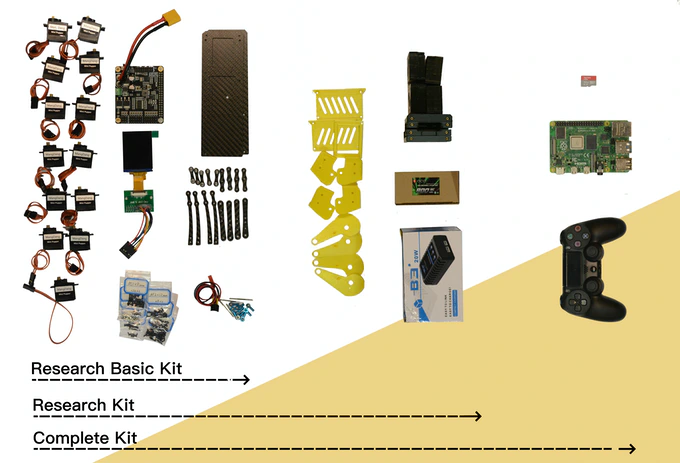
For the detailed BOM list information, please refer to Mini Pupper BOM List.
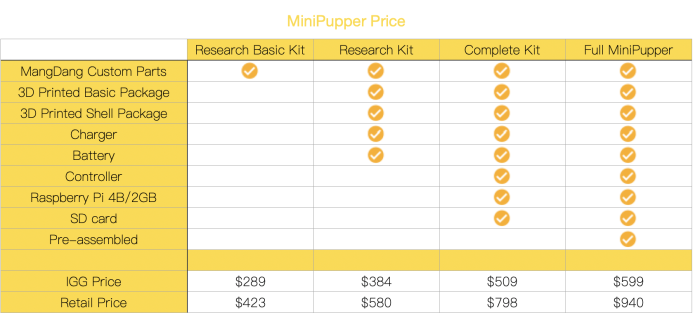
Package Recommendation:
Research Basic Kit: For deep custom users, you need to prepare: soldering iron, 3D printed machine, battery, charger, controller, Raspberry Pi, SD card.
Research Kit: You only need to prepare: Controller, Raspberry Pi, SD card.
Complete kit: Includes all the parts and tools to build and program.
Full Mini Pupper: Everything you will need to run and program your Mini Pupper Robot right out of the box. All software is installed and calibration has been completed.
Add-Ons:
Lidar module: If you want to explore ROS SLAM, Navigation functions based on Lidar, you also need a Lidar module. We can ONLY ensure the Lidar module can work well based on our source code, and NOT ensure that you get from other channels. We fixed some software problems based on our source code, and if you like, we can also share with you our ROS2 driver for this Lidar. Definitely, we will supply a user guide to let you use it easily. We already tested some Lidar modules, such as, PRLidar A1, YDLidar X2L, and LD06. For Mini Pupper, we refer to LD06 as it is smaller. LD06 Lidar module price is same as their campaign price, but we will ship one additional Mini Pupper servo as a gift.
Camera module: For potential security issues, the camera module is not included in our default package. If you want to explore camera AI functions, you can choose a normal USB camera module, of course, a 3D camera module is better for study. If try the 3D camera module, we recommend you OpenCV’s latest 3D camera module, named OAK-D LITE, comes from OpenCV&Luxonis. We will supply a user guide to let you use it easily.